文章
文章
搜索
首页
产品中心
综合性船载定位定姿产品
TS POS 08 定位定姿系统
TS POS 15 定位定姿系统
TS POS 25 定位定姿系统
TS POS ONE 定位定姿系统
无人船系统
TS 1500R 便捷式多波束无人船
TS 1500K 无人船
TS 4000 无人船
TS USV4800 海洋测量无人船
海洋高分辨地震勘探仪
e-PPS 1KJ-pro高性能脉冲震源
e-PPS 2KJ 常规脉冲震源
e-PPS 2KJ pro高性能脉冲震源
e-PPS 5KJ 常规脉冲震源
e-SeisProfiler地层剖面系统
气象站
TM530 手持气象传感器
宽频带多波束回声测深仪系列
TS 2020宽频带多波束回声测深仪
TS 2022宽频带多波束回声测深仪
TS 2024宽频带多波束回声测深仪
TS 2026宽频带多波束回声测深仪
TS 2024E 宽频带多波束定频回声测深仪
TS 2022E 宽频带多波束定频回声测深仪
参量阵浅地层剖面测量系统
TS SBP-100 参量阵浅地层剖面仪
走航式声学多普勒流速剖面仪
TS 600型走航式声学多普勒流速剖面仪
TS 300型走航式声学多普勒测流仪
水下安防系统
分裂波束声呐系统FD-140
TS 3D-500三维成像仪
吊放式蛙人探测声呐
TS SOS US-215 水声测量仪
解决方案
公共安全
技术案例
智慧水域
服务支持
下载中心
新闻资讯
关于我们
关于同盛
市场活动
人才招聘
联系我们
English
产品中心 / Product center
首页
>>
产品中心
>>
参量阵浅地层剖面测量系统
>>
TS SBP-100 参量阵浅地层剖面仪
产品中心
综合性船载定位定姿产品
无人船系统
海洋高分辨地震勘探仪
气象站
宽频带多波束回声测深仪系列
参量阵浅地层剖面测量系统
走航式声学多普勒流速剖面仪
水下安防系统
详细说明
TS SBP-100 参量阵浅地层剖面仪
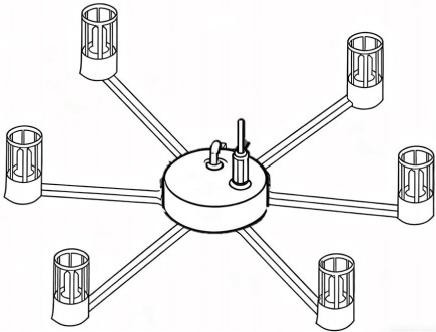
参量阵信号技术:在高电压驱动模式下同时向海底发射2个频率相近的高频脉冲信号(F1,F2,F1>F2)作为主题,两个频率在水下传播时会发生相互作用,产生二次频率,如F1+F2,F1-F2,2F1,2F2等等,其中F1高频用于探测水深,(F1+F2)用来记录水体信息。(F1-F2)用于穿透海底沉积物,探测海底地层,并保持高频脉冲信号波束角不变,同时保持较高分辨率。因此参量阵技术具有较高的参透和较高的地层分辨率。
产品说明
相关产品
TS SOS US-215 水声测量仪
TS POS ONE 定位定姿系统
吊放式蛙人探测声呐
TS 3D-500三维成像仪